Sie befinden sich hier
Inhalt
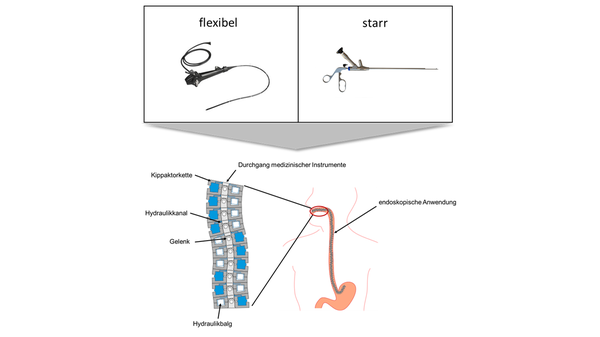
Endoskopische Verfahren für Diagnostik und Therapie verändern die Medizin nachhaltig. Interventionen können damit minimalinvasiv erfolgen und sind dadurch nicht nur effizienter geworden, auch die Rekonvaleszenzzeit wurde minimiert. Für einen erfolgreichen Eingriff müssen zwei wichtige Faktoren erfüllt sein: Um schwer zugängliche Gebiete erreichen zu können, ist eine gute Manövrierbarkeit nötig. Zusätzlich erfordert der Eingriff im Zielbereich eine hohe Struktursteifigkeit, um Manipulationskräfte aufnehmen zu können und dem Arzt eine feste Arbeitsplattform zur Verfügung zu stellen. Heutige Endoskope können jedoch nicht beide Anforderungen gleichzeitig erfüllen. Es werden entweder rein starre oder rein flexible Endoskope verwendet, äußerst selten sind – selbst in der Forschung – versteifbare Mechanismen anzutreffen. Als Brückenschlag zwischen flexiblen und starren Robotern soll daher ein hydraulisch aktuiertes, schlangenartiges Endoskop erforscht werden.
Im Vordergrund steht dabei ein Kippaktor, der verschiedene Vorteile vereint: Die hydraulische Druckbeaufschlagung zweier um eine Kippachse angeordneter, antagonistischer Bälge ermöglicht die Einstellung von unterschiedlichen Kippwinkeln, was die Positioniergenauigkeit des Endoskops deutlich erhöht. Bei einem geeigneten Aktordesign, einer geschickten Anordnung der Bälge und Ansteuerung der Ventile können außerdem unterschiedliche Systemsteifigkeiten erreicht werden. Durch eine hohe Anzahl von Aktoren kann neben der zeitlichen auch eine örtlich veränderliche Nachgiebigkeit erreicht werden, was eine Grundvoraussetzung für eine anatomieoptimale Anpassung bei gleichzeitiger Bereitstellung einer steifen Arbeitsplattform für den Arzt darstellt. Bei Wahl eines biokompatiblen Fluids sowie eines medizinisch vertretbaren Systemdrucks ist der reale Einsatz in der Klinik aussichtsreich.
Klinischer Aspekt
In der Endoskopie kann heute je nach Anwendung entweder ein starres oder ein flexibles Endoskop eingesetzt werden. Das Ziel in Haley ist es, hybride Endoskope zu entwickeln, deren Steifigkeit lokal einstellbar ist. Eine mögliche Anwendung ist ein Endoskop, das beim Vorschub durch die Speiseröhre flexibel ist, beim Erreichen einer Endposition im Magen aber so versteift wird, dass nur noch das distale Ende beweglich ist, um eine bessere Abstützung in der Speiseröhre zu ermöglichen.
Forschungsinhalte
Im Rahmen des Verbundprojekts Haley beschäftigt sich das MIISM mit der Entwicklung kompakter Kippaktoren auf Basis neuartiger Antriebstechnologien, sowie der Optimierung und Simulation der Elemente. Die Herausforderung hierbei ist, ein System mit einer hohen Anzahl von Aktoren und Sensoren in einem kompakten Bauraum zu realisieren.
Weiterhin steht der Aufbau einer Pipeline zur automatisierten Gestaltoptimierung der entwickelten Balgstrukturen im Fokus.
Ergebnisse
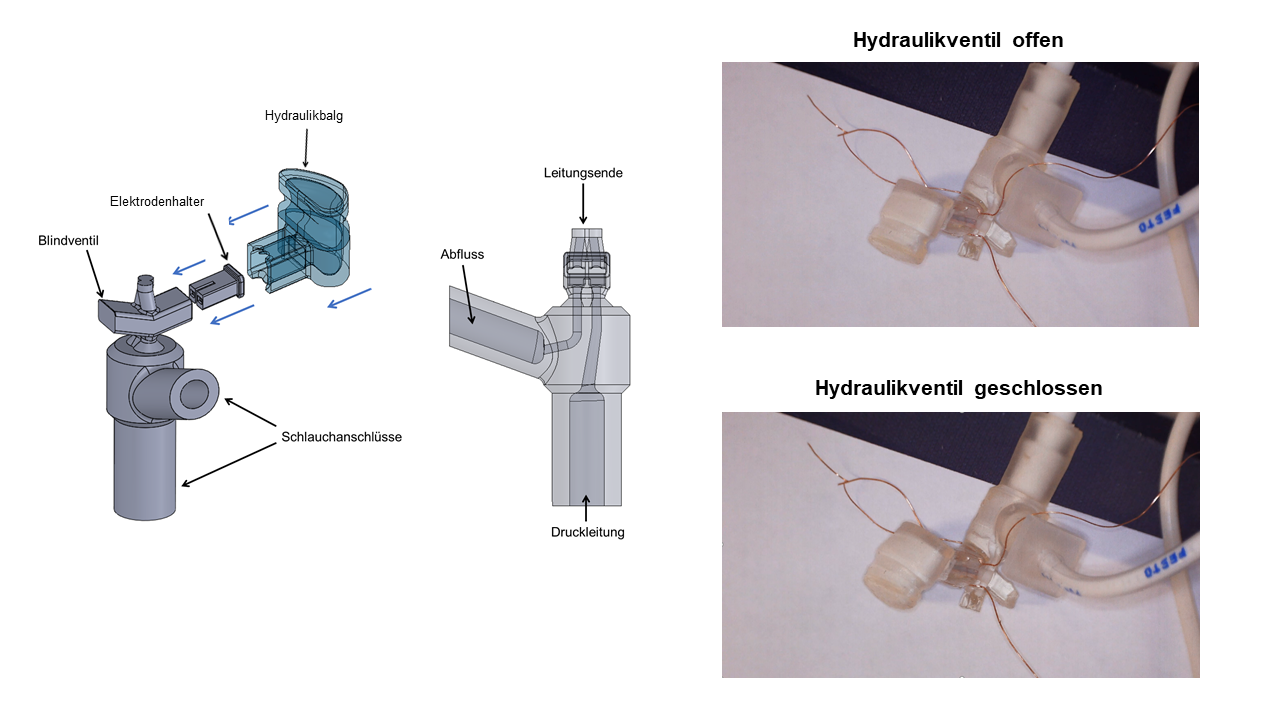
Im Rahmen einer Masterthesis konnte ein erster Prototyp eines einzelnen hydraulischen Aktors entwickeln werden. Wie in Abbildung 2 zu sehen, wurde dabei ein Herstellungsverfahren erforscht, das die Integration der Elektronik in die elastischen, 3D-gedruckenten Komponenten ermöglicht. Die hydraulische Flüssigkeit stellt dabei eine intelligente Flüssigkeit dar. Die Fließgrenze der Flüssigkeit kann durch ein elektrisches Feld reversibel drastisch gesteigert werden. Aufgrund dieser Flüssigkeitseigenschaft können sehr kleine Ventile durch einfache Elektroden realisiert werden. Im Abschluss dieser Arbeit wurde die prinzipielle Funktionsweise des Aktorprototyps mit Hilfe eines Funktionsprüfstands bestätigt. Dabei konnte, wie in Abbildung 2 rechts zu erkennen, eine Ausdehnung des Balgs beobachtet werden, sobald das hydraulische Ventil geschlossen wurde.
Kontextspalte
Ansprechpartner

Dipl.-Ing. Marius Siegfarth
Wissenschaftlicher Mitarbeiter
Telefon 0621 383-8534
marius.siegfarth@medma.uni-heidelberg.de